TEMPAT SAMPAH OTOMATIS BERBASIS ARDUINO UNO
LABORATORIUM
MIKROKONTROLLER II
TEMPAT
SAMPAH OTOMATIS BERBASIS ARDUINO UNO

Dosen Penngampu:
Dr. Samuel Beta K., Ing. Tech.,
M.T.
Disusun Oleh :
1. Aditomo Wibowo Mukti (4.34.22.1.02)
2. Friska Putri Anggraeni (4.34.22.1.09)
3. Muhammad Rafi (4.34.22.1.16)
4. Rizqi Andika Iqbal (4.34.22.1.22)
PROGRAM STUDI TEKNOGI REKAYASA
ELEKTRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI SEMARANG
2023/2024
1. LATAR BELAKANG
Dalam era moderen ini, perkembangan teknologi telah memberikan dampak signifikan terhadap berbagai aspek kehidupan manusia, termasuk dalam bidang pengelolaan sampah. Salah satu inovasi yang dapat meningkatkan efisiensi dan kebersihan dalam proses pembuangan sampah adalah tempat sampah otomatis berbasis sensor infra red.
Proyek ini bertujuan untuk merancang dan mengimplementasikan sebuah tempat sampah otomatis yang dapat terbuka secara otomatis saat mendeteksi keberadaan objek di dekatnya, khususnya tangan manusia yang akan membuang sampah. Dengan menggunakan sensor infra red, tempat sampah ini mampu merespon kehadiran objek dengan cepat dan akurat, sehingga pengguna tidak perlu menyentuh tempat sampah secara langsung. Hal ini tidak hanya meningkatkan kenyamanan, tetapi juga menjaga kebersihan dan mengurangi risiko penyebaran kuman dan bakteri.
2. RUMUSAN MASALAH
1.Bagaimana cara mendeteksi gerakan tangan secara akurat untuk membuka tutup tempat sampah otomatis menggunakan sensor inframerah?
2.Bagaimana cara menentukan dan menampilkan status kapasitas tempat sampah secara real-time menggunakan sensor ultrasonik dan LCD I2C?
3. Bagaimana cara meningkatkan minat masyarakat dalam membuang sampah pada tempatnya
3. TUJUAN
1.Merancang dan mengimplementasikan sistem deteksi gerakan yang efisien menggunakan sensor inframerah untuk membuka dan menutup tutup tempat sampah otomatis
2. Mengembangkan sistem pemantauan kapasitas tempat sampah yang dapat menampilkan status penuh atau tersedia secara real-time menggunakan sensor ultrasonik dan LCD I2C..
3.Membuat tempat sampah otomatis diharapkan mampu meningkatkan minat masyarakat untuk membuang sampah paa tempatnya
Berdasarkan rumusan masalah diatas
4. DASAR TEORI
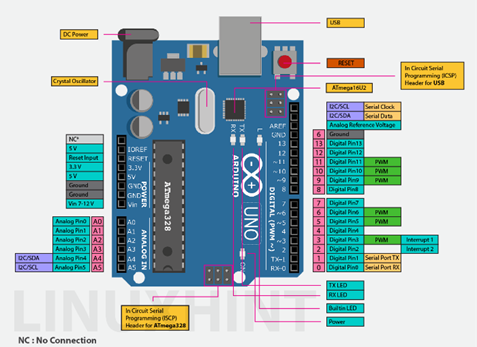
4.1 Arduino Uno
Arduino Uno R3 adalah sebuah papan mikrokontroler yang sangat populer dan mudah digunakan, dirancang untuk membuat proyek-proyek elektronik menjadi lebih sederhana dan dapat diakses oleh semua orang, dari pemula hingga profesional.
Arduino Uno R3 dilengkapi dengan memori flash sebesar 32KB untuk menyimpan kode program, 2KB SRAM untuk menjalankan program, dan 1KB EEPROM untuk menyimpan data yang harus tetap ada meskipun daya dimatikan. Papan ini memiliki clock dengan frekuensi 16 MHz, yang cukup cepat untuk banyak aplikasi umum.
Untuk
sumber daya, Arduino Uno R3 memerlukan tegangan sekitar 5 volt dan dapat
dihubungkan langsung ke komputer melalui kabel USB untuk daya dan komunikasi.
Selain itu, papan ini memiliki 28 pin yang sering digunakan untuk berbagai
fungsi. Dari jumlah tersebut, 14 pin adalah pin digital (dari pin 0 hingga 13),
yang dapat digunakan sebagai input atau output, dengan 6 di antaranya mendukung
output PWM untuk aplikasi yang memerlukan kontrol sinyal analog.
Selain pin
digital, ada juga 6 pin input analog (A0 hingga A5) yang digunakan untuk
membaca sinyal analog dari sensor. Arduino Uno R3 juga memiliki pin untuk
sumber daya eksternal jika tidak ingin menggunakan USB, serta pin ground dan
tegangan referensi untuk mendukung berbagai komponen elektronik lainnya.
Secara
keseluruhan, Arduino Uno R3 adalah alat yang sangat fleksibel dan berguna untuk
berbagai proyek elektronik, mulai dari robotika hingga sistem otomatisasi
rumah, berkat kemampuannya untuk diprogram dan terhubung dengan berbagai sensor
dan aktuator.
4.2. Motor Servo
Motor servo adalah
jenis motor yang dirancang untuk mengendalikan posisi sudut dengan presisi
tinggi. Motor ini sering digunakan dalam aplikasi yang membutuhkan kontrol
posisi yang akurat, seperti robotika, sistem kontrol, dan perangkat
otomatisasi.
Prinsip Kerja:
Motor servo menerima
sinyal kontrol berupa pulsa PWM (Pulse Width Modulation). Lebar pulsa
menentukan posisi yang diinginkan. Motor servo akan memutar porosnya ke posisi
yang sesuai dengan lebar pulsa tersebut. Jika posisi aktual berbeda dari posisi
yang diinginkan, motor akan bergerak hingga mencapai posisi yang diinginkan.

4.3.Sensor Infra Red
(IR)
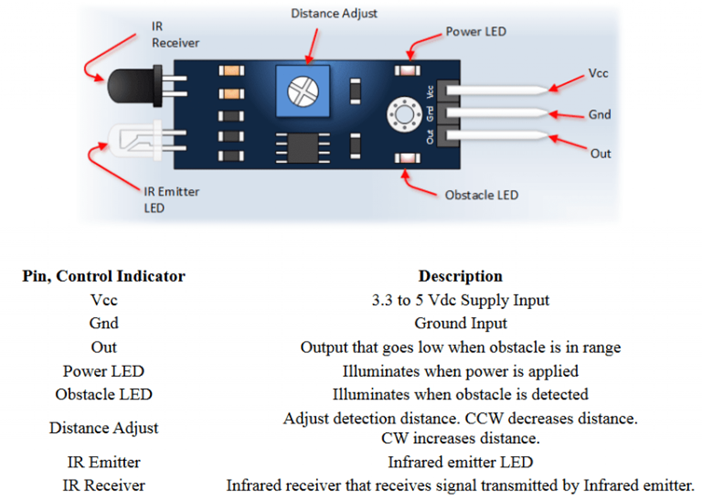
Infra red (IR) detektor
atau sensor infra merah adalah komponen elektronika yang dapat mengidentifikasi
cahaya infra merah (infra red, IR). Sensor infra merah atau detektor infra
merah saat ini ada yang dibuat khusus dalam satu modul dan dinamakan sebagai IR
Detector Photomodules. IR Detector Photomodules merupakan sebuah chip detektor
inframerah digital yang di dalamnya terdapat fotodiode dan penguat (amplifier).
Detektor infra merah
atau sensor inframerah jenis TSOP (TEMIC Semiconductors Optoelectronics
Photomodules) adalah penerima inframerah yang telah dilengkapi filter frekuensi
30-56 kHz, sehingga penerima langsung mengubah frekuensi tersebut menjadi
logika 0 dan 1. Jika detektor inframerah (TSOP) menerima frekuensi carrier
tersebut, maka pin keluarannya akan berlogika 0. Sebaliknya, jika tidak
menerima frekuensi carrier tersebut, maka keluaran detektor inframerah (TSOP)
akan berlogika 1.
- Output
(Out)
- Vs (VCC
+5 volt DC)
- Ground
(GND)
4.4.LCD I2C

I2C adalah modul LCD yang menggunakan antarmuka I2C (Inter-Integrated
Circuit) untuk komunikasi, yang hanya memerlukan dua pin dari mikrokontroler,
yaitu SDA (Serial Data) dan SCL (Serial Clock). Modul ini umumnya digunakan
dengan LCD 16x2 atau 20x4, yang berarti dapat menampilkan 16 atau 20 karakter
per baris dan memiliki 2 atau 4 baris. LCD I2C sangat populer dalam proyek
Arduino karena menghemat jumlah pin yang digunakan dibandingkan dengan LCD
konvensional yang memerlukan lebih banyak pin untuk beroperasi. Modul ini
biasanya dilengkapi dengan backlight dan kontrol kontras yang bisa diatur
dengan potensiometer.
4.5.Sensor ultrasonic

Sensor ultrasonik adalah alat yang menggunakan
gelombang suara ultrasonik untuk mengukur jarak antara sensor dan objek di
depannya. Sensor ini terdiri dari dua komponen utama: transmitter (pemancar)
yang mengirimkan gelombang ultrasonik dan receiver (penerima) yang menerima
gelombang yang dipantulkan kembali dari objek. Sensor ultrasonik mengukur waktu
yang diperlukan bagi gelombang untuk kembali setelah memantul dari objek, dan
menggunakan waktu tersebut untuk menghitung jarak. Sensor ini sangat akurat dan
sering digunakan dalam berbagai aplikasi, seperti penghindaran rintangan pada
robot, pengukuran ketinggian cairan dalam tangki, dan dalam proyek seperti
tempat sampah otomatis untuk mendeteksi ketinggian sampah di dalamnya.
5.KEGIATAN PELAKSANAAN
Proses pembuatan sistem pada Project Akhir ini
memerlukan rancangan dan bahan tertentu serta dibagi mejadi beberapa tahapan.
Berikut tahapan-tahapan yang dilaksanakan.
5.1
Definisi Sistem
Sistem ini adalah sebuah proyek yang bertujuan untuk merancang dan mengimplementasikan tempat sampah otomatis menggunakan teknologi sensor dan kontroler Arduino. Tempat sampah ini dilengkapi dengan sensor inframerah, sensor ultrasonik, motor servo, dan tampilan LCD I2C untuk meningkatkan efisiensi dan kebersihan dalam proses pembuangan sampah.
5.2.
Diagram Blok
Pada bagian ini, terlebih dahulu membuat
perencanaan diagram blok yang merupakan tahap pertama dalam merancang dan
menyusun rangkaian yang dibutuhkan untuk Project Akhir. Untuk memahami cara
kerja sistem, terlebih dahulu harus memahami cara kerja tiap blok rangkaian.
Diagram blok keseluruhan untuk sistem parkir ini dapat dilihat pada Gambar 5.2
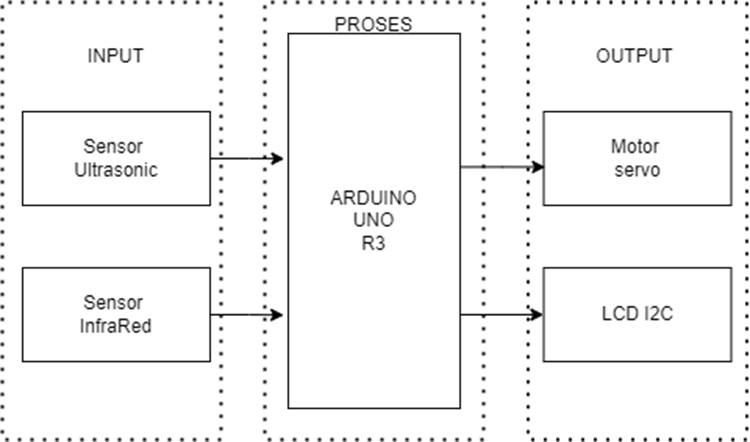
Gambar 5.2 Diagram Blok
A. Masukan
· Sensor Infrared: Digunakan untuk
mendeteksi gerakan tangan di dekat tutup tempat sampah. Ketika gerakan
terdeteksi, sensor ini memberikan sinyal ke mikrokontroler.
· Sensor Ultrasonik:
Mengukur jarak ke objek (sampah) di dalam tempat sampah. Jarak ini digunakan
untuk menentukan apakah tempat sampah sudah penuh atau belum.
B. Proses
· Arduino Uno R3: Arduino uno berperan
sebagai otak dari program ini , dengan rincian proses sebagai begikut :
-Baca nilai dari sensor infrared: Memantau apakah ada gerakan
tangan di dekat tutup tempat sampah.
-Baca nilai dari sensor ultrasonik: Mengukur durasi sinyal echo dan
menghitung jarak berdasarkan durasi tersebut.
-Hitung jarak berdasarkan durasi sinyal echo: Menggunakan formula
tertentu untuk menghitung jarak dari sensor ultrasonik.
-Kendalikan motor servo untuk
membuka/tutup lid: Berdasarkan deteksi gerakan dari sensor infrared dan
status penuh/tidak penuh dari sensor ultrasonik.
- Perbarui tampilan LCD
berdasarkan status: Menampilkan informasi pada LCD apakah tempat sampah
tersedia atau penuh.
- Tampilan LCD: Menampilkan status tempat sampah (tersedia atau
penuh) berdasarkan jarak yang diukur oleh sensor ultrasonik.
C.Keluaran
· Motor Servo: Menggerakkan tutup tempat
sampah untuk membuka atau menutup berdasarkan input dari sensor infrared.
· Tampilan LCD: Menampilkan
status tempat sampah (tersedia atau penuh) berdasarkan jarak yang diukur oleh
sensor ultrasonik.
5.3. Cara
Kerja Alat
Proyek
tempat sampah otomatis ini menggunakan sensor infrared untuk mendeteksi gerakan
tangan, mengaktifkan motor servo untuk membuka dan menutup tutup tempat sampah,
serta sensor ultrasonik untuk mengukur ketinggian sampah di dalamnya. Jika
sensor ultrasonik mendeteksi bahwa tempat sampah sudah penuh, LCD I2C akan
menampilkan pesan "PENUH". Jika tidak, LCD akan menampilkan pesan
"TERSEDIA". Semua komponen ini diatur dan dikendalikan oleh Arduino
Uno yang telah diprogram untuk menjalankan tugas-tugas ini secara otomatis,
sehingga meningkatkan kebersihan dan kenyamanan dalam penggunaan tempat sampah.
5.4.
Diagram Pengawatan InfraRed sensor

Gambar 5.4 Pengawatan InfraRed sensor
Sensor InfraRed (IR) digunakan untuk mendeteksi kehadiran objek di dekatnya, dalam hal ini, tangan manusia yang akan membuang sampah. Sensor ini bekerja dengan mengirimkan sinyal inframerah dan mendeteksi pantulan dari objek yang mendekat. Ketika tangan mendekat ke tempat sampah, sensor IR akan mendeteksi perubahan ini dan mengirimkan sinyal ke mikrokontroler (Arduino).
5.4.1
Diagram Pengawatan Ultrasonik
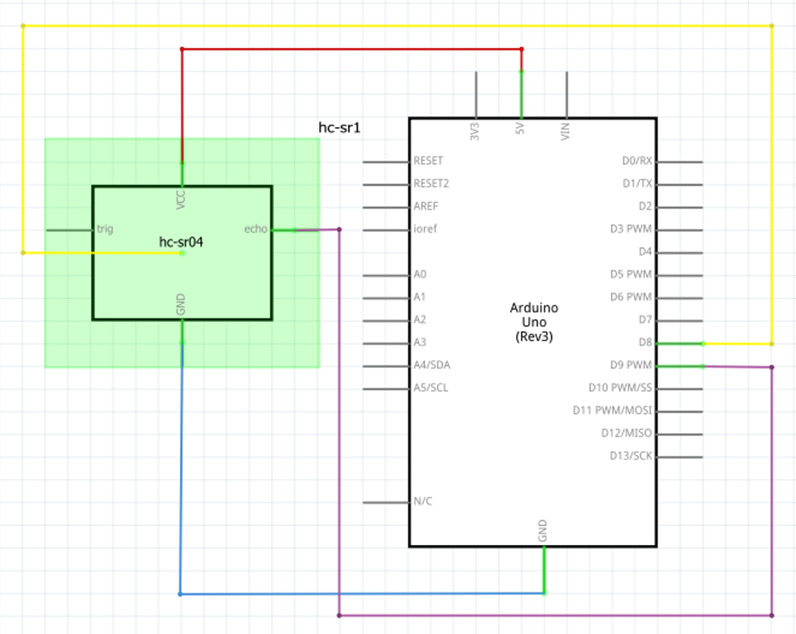
Gambar 5.4.1 Pengawatan ultrasonik
Sensor ultrasonik digunakan untuk mendeteksi apakah
tempat sampah masih tersedia , atau sudah penuh . Penempatan sensor ultrasonic ditelakan
dekat tutup tempat sampah sehingga apabila sensor ultrasonic mendeteksi didepan nya ada sampah maka tempat sampah
itu sudah penuh
sensor ultrasonic memiliki 4 koneksi utama yaitu VCC, GND, Echo, dan Trigger.
Koneksi VCC dan GND pada kedua sensor dihubungkan dengan sumber tegangan dan
ground pada Arduino Uno R3. Pin Echo pada sensor ultrasonik masuk dihubungkan
ke pin 9 pada Arduino Uno R3, sedangkan pin Trigger dihubungkan ke pin 8.
5.4.2
Diagram Pengawatan Servo

Gambar 5.4.2 Pengawatan servo
Sensor InfraRed(IR) digunakan untuk mendeteksi kehadiran objek di dekatnya, dalam hal ini, tangan manusia yang akan membuang sampah. Sensor ini bekerja dengan mengirimkan sinyal inframerah dan mendeteksi pantulan dari objek yang mendekat. Ketika tangan mendekat ke tempat sampah, sensor IR akan mendeteksi perubahan ini dan mengirimkan sinyal ke mikrokontroler (Arduino).
5.4.3. Diagram Pengawatan Modul LCD I2C

Gambar 5.4.3 Pengawatan modul LCD I2C
LCD I2C Digunakan untuk
menampilkan status tempat sampah, apakah "TERSEDIA" atau
"PENUH". LCD ini terhubung ke Arduino melalui dua pin I2C (SDA dan
SCL), memungkinkan komunikasi yang efisien
5.5.
Pembuatan Rangkaian Elektronika
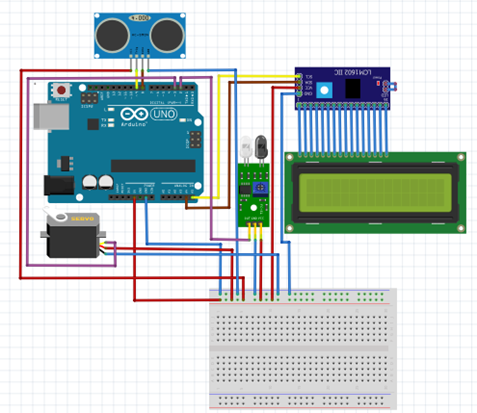
Gambar 5.5 Rangkaian Elektronika
5.6. Diagram alir
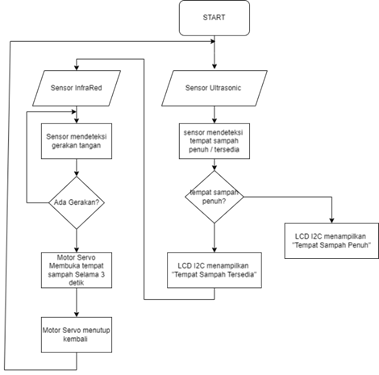
Gambar 5.6 Diagram Alir
6. Kesimpulan
Proyek ini berhasil merancang dan mengimplementasikan tempat sampah otomatis
berbasis sensor infra red yang dapat membuka dan menutup secara otomatis saat
mendeteksi keberadaan objek. Sistem ini menunjukkan kinerja yang baik dalam
berbagai kondisi lingkungan, menawarkan solusi yang lebih higienis dan praktis
untuk pengelolaan sampah.

Comments
Post a Comment