SISTEM MANAJEMEN PARKIR DENGAN PALANG OTOMATIS DAN PEMANTAUAN JUMLAH KENDARAAN BERBASIS ARDUINO IDE
LAPORAN
LABORATORIUM MIKROKONTROLLER 2
SISTEM MANAJEMEN PARKIR DENGAN PALANG OTOMATIS DAN PEMANTAUAN JUMLAH KENDARAAN BERBASIS ARDUINO IDE
Dosen Pengampu:
Dr. Samuel Beta K. K., Ing.Tech., M.T.
Disusun Oleh:
KELOMPOK 3
Hispano Suiza Artileri RE-2B (4.34.22.1.10)
PROGRAM STUDI TEKNOLOGI REKAYASA ELEKTRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI SEMARANG
2024
PENDAHULUAN
1.1. Latar Belakang
Dengan meningkatnya jumlah kendaraan di perkotaan, kebutuhan akan sistem manajemen parkir yang efisien menjadi semakin krusial. Sistem parkir konvensional yang tidak mampu menyediakan informasi real-time tentang ketersediaan slot parkir menyebabkan pengendara menghadapi kesulitan dalam menemukan tempat parkir yang tersedia. Hal ini tidak hanya menimbulkan stres dan frustrasi tetapi juga mengakibatkan pemborosan waktu dan bahan bakar. Selain itu, pengelolaan parkir secara manual rentan terhadap kesalahan manusia yang dapat menghambat efisiensi operasional dan perencanaan.1.2. Rumusan Masalah
1.3. Solusi
2.1. Arduino Uno R3

2.2. Sensor Ultrasonik HCSR-04

- Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
- Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
- Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus s = 340.t/2 Dimana s merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.

2.3. Motor Servo

- Tidak bergetar dan tidak ber-resonansi saat beroperasi.
- Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
- Penggunaan arus listik sebanding dengan beban yang diberikan.
- Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
- Tidak berisik saat beroperasi dengan kecepatan tinggi.

2.4. Modul OLED I2C 0x96"

3.1. Tahap Perancangan
3.1.1. Definisi Sistem
3.1.2. Diagram Blok
- Push button digunakan sebagai sarana untuk membuka dan menutup palang pada sistem parkir.
- Sensor Ultrasonik dipasang di pintu masuk dan keluar area parkir untuk mendeteksi keberadaan kendaraan yang mendekat. Ketika sebuah kendaraan terdeteksi, maka palang akan tertutup. Dengan mendeteksi kendaraan yang masuk dan keluar, sensor ultrasonik menghitung jumlah kendaraan yang ada di dalam area parkir. Data ini kemudian digunakan untuk menentukan ketersediaan slot parkir secara real-time.
- LED RGB digunakan sebagai indikator palang. Saat palang tertutup maka LED akan menyala warna merah, sedangkan saad palang terbuka, maka LED akan menyala warna hijau.
- Modul OLED I2C 0x96" digunakan untuk menampilkan informasi dengan menampilkan jumlah mobil yang keluar dan masuk serta ketersediaan slot parkir.
- Motor Servo digunakan untuk menggerakkan terbuka dan tertutupnya palang parkir.
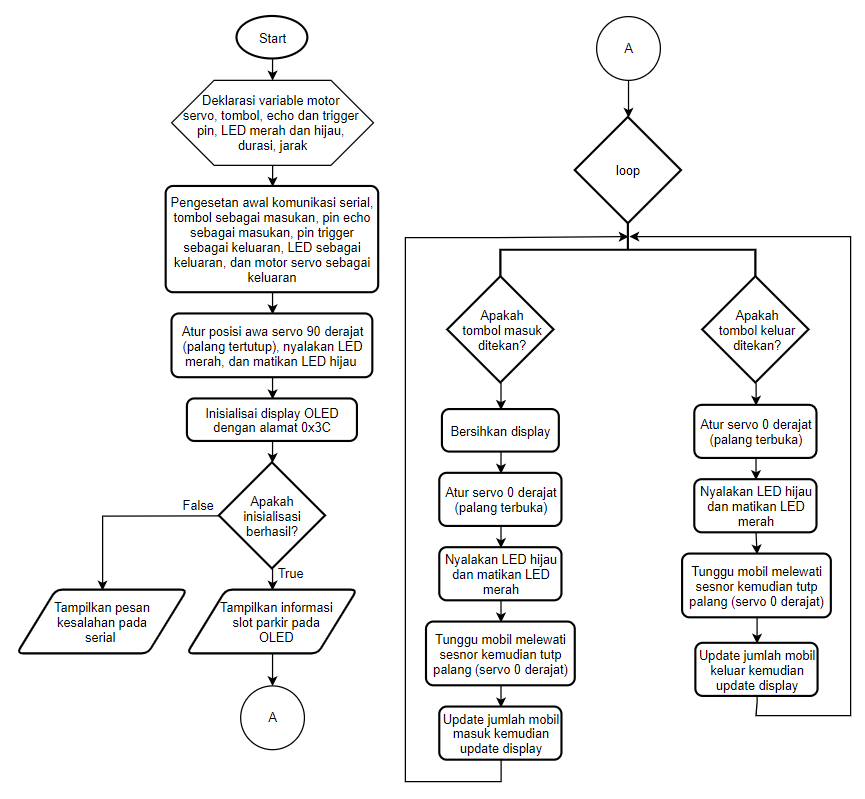
3.1.3. Cara Kerja Alat
3.1.4. Diagram Pengawatan Push Button

3.1.5. Diagram Pengawatan Ultrasonik

Setiap sensor ultrasonik memiliki empat koneksi utama: VCC, GND, Echo, dan Trigger. Koneksi VCC dan GND pada kedua sensor dihubungkan dengan sumber tegangan dan ground pada Arduino Uno R3. Pin Echo pada sensor ultrasonik masuk dihubungkan ke pin 4 pada Arduino Uno R3, sedangkan pin Trigger dihubungkan ke pin 5. Pin Echo pada sensor ultrasonik keluar dihubungkan ke pin 10 pada Arduino Uno R3, sedangkan pin Trigger dihubungkan ke pin 11.
3.1.6. Diagram Pengawatan Servo

3.1.7. Diagram Pengawatan Modul OLED

Modul OLED digunakan untuk menampilkan informasi terkait slot parkir. Informasi yang ditampilkan dapat mencakup jumlah kendaraan yang masuk dan keluar dan jumlah slot parkir yang tersedia. Modul OLED memberikan tampilan visual yang memudahkan pengguna untuk melihat informasi secara real-time. Ini membantu dalam memantau status parkir dengan lebih efektif dan efisien.
Setiap pin pada modul OLED memiliki peran penting dalam koneksi ke Arduino Uno R3. Koneksi VCC dan GND memastikan modul OLED mendapatkan daya yang cukup. Pin SDA dan SCL memungkinkan komunikasi data antara modul OLED dan Arduino menggunakan protokol I2C. Diagram pengawatan ini memastikan bahwa modul OLED dapat berfungsi dengan baik untuk menampilkan informasi slot parkir secara real-time.
3.1.8. Diagram Pengawatan LED

3.2. Tahap Pembuatan
- Pembuatan rangkaian elektronika
- Pembuatan program
- pembuatan mekanik
3.2.1. Pembuatan Rangkaian Elektronika

3.2.2. Pembuatan Program
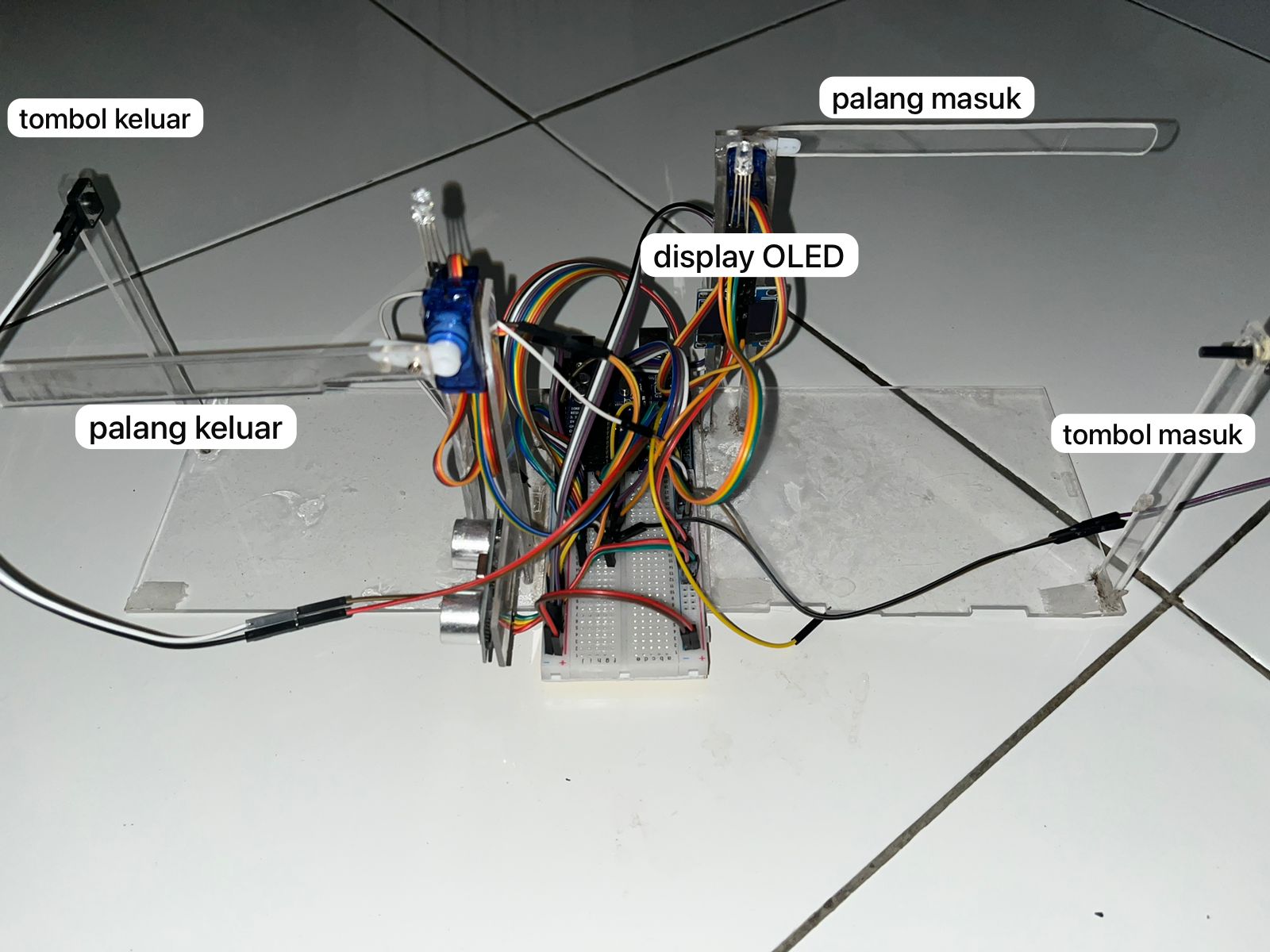
3.2.3. Pembuatan Mekanik
3.3. Simulasi
4.1. Kesimpulan
- Konsep desain awal dapat diimplementasikan secara praktis. Sistem palang otomatis dan sensor pemantauan jumlah kendaraan dapat bekerja bersama dengan baik untuk mengelola arus masuk dan keluar kendaraa.
- Uji coba pada prototype menunjukkan bahwa sistem mampu mengoperasikan palang secara otomatis dengan responsif dan akurat berdasarkan input dari sensor ultrasonik dan push button. Selain itu, sistem berhasil menghitung jumlah kendaraan yang masuk dan keluar dari area parkir secara real-time.


Comments
Post a Comment